ъ
Методы машинного обучения
Шестаков Андрей (avshestakov@hse.ru)
Методы кластеризации 2
Оценка качества кластеризации
Цели и задача кластеризации¶
Задача¶
Основная задача кластерного анализа — разбиение исходного набора объектов на группы (кластеры) таким образом, чтобы:
- Объекты в группе были похожи друг на друга,
- Объекты из разных групп - отличались
Цели¶
- Поиск структуры в данных и ее интерпретация
- Поиск аномальных объектов
- Детальный анализ отдельных кластеров
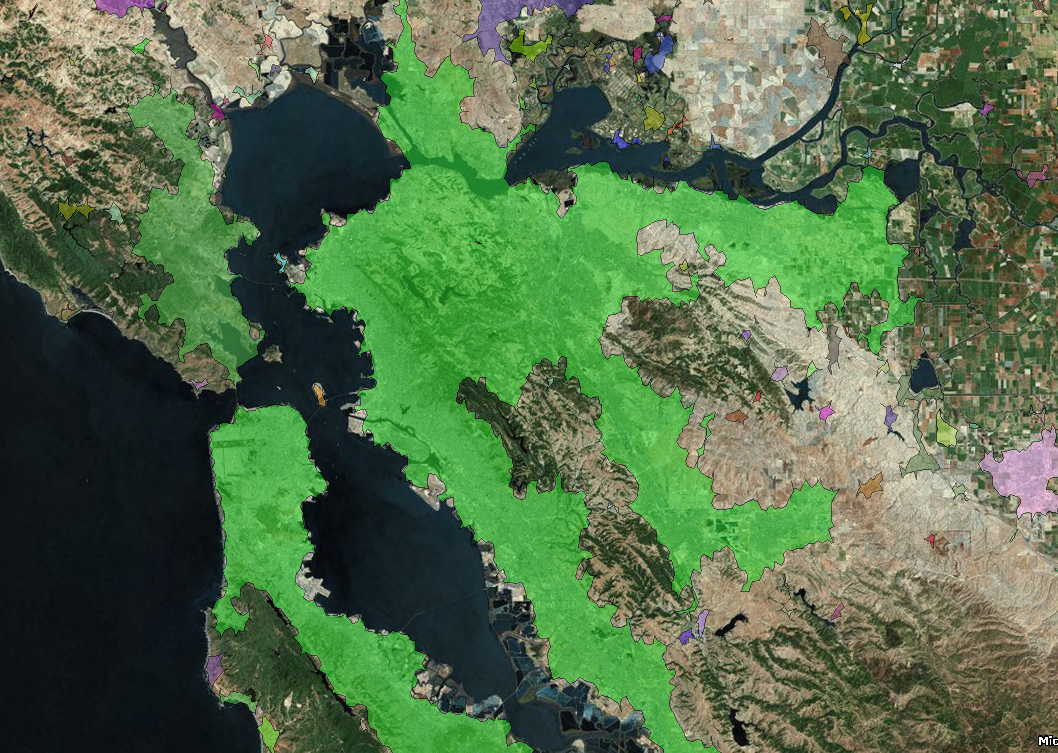
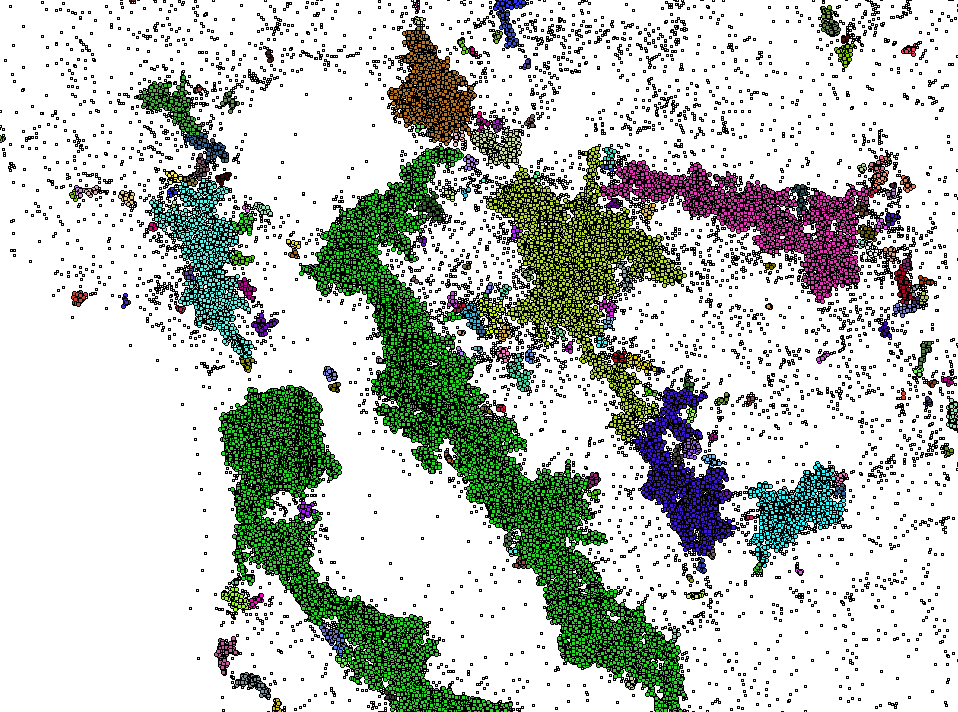
Геоданные¶
 |
 |
|---|
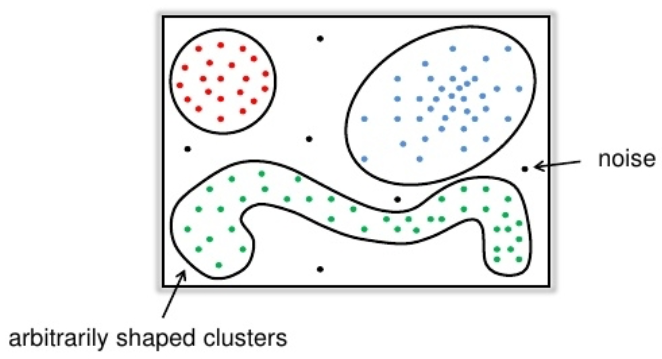
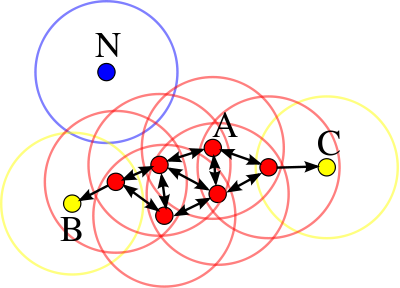
Основная идея¶
- Для каждой точки кластера её окрестность заданного радиуса $\epsilon$ должна содержать не менее некоторого числа точек
min_pts. - C такой точки можно начать расширение "плотного" кластера
Типы объектов¶
- Объект $x_i$ называется сore-объектом, если $N_\epsilon(x_i) \geq \texttt{min_pts}$
- Объект $x_i$ называется граничным объектом, если $N_\epsilon(x_i) < \texttt{min_pts}$, но $\exists x_j : d(x_i, x_j) \leq \epsilon$ и $x_j$ - core-объект
- Объект $x_i$ называется шумовым, если он не является ни граничным ни core объектом
In [4]:
interact(dbscan_demo, eps=FloatSlider(min=0.1, max=10, step=0.05, value=1), min_pts=IntSlider(min=2, max=15, step=1, value=5))
Out[4]:
Недостатки¶
- Не работает при различных плотностях кластеров
Модели смеси распределений¶
Одномерное распределение¶
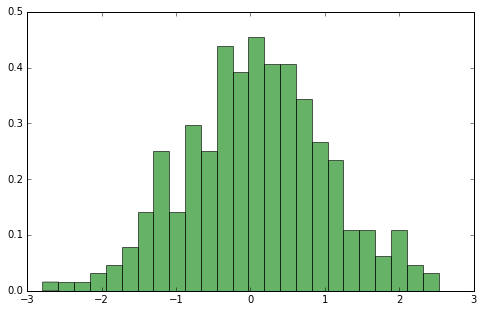
Аппроксимируем параметрическим вероятностным распределением¶
В одномерном случае $$ p(x | \theta) = \mathcal{N}(x|\mu, \sigma) = \frac{1}{\sqrt{2\pi\sigma^2}}\exp\left({-\frac{(x-\mu)^2}{2\sigma^2}}\right) $$ В многомерном $$ p(x | \theta) = \mathcal{N}(x|\mu, \Sigma) = \frac{1}{(2\pi\Sigma)^{1/2}}\exp\left(-\frac{1}{2}(x-\mu)^\top\Sigma^{-1}(x-\mu)\right) $$
 </cetner>
</cetner>
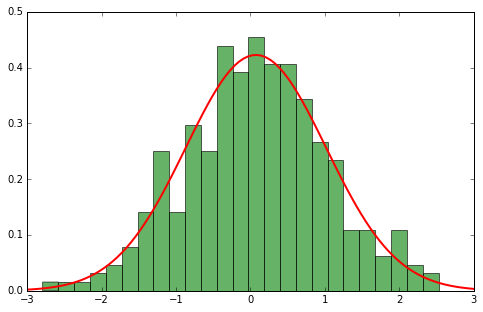
Оценка параметров с помощью ММП¶
- Рассмотрим логарифм правдоподобия
- Возьмем производные и приравняем к 0. Получим оценки параметров
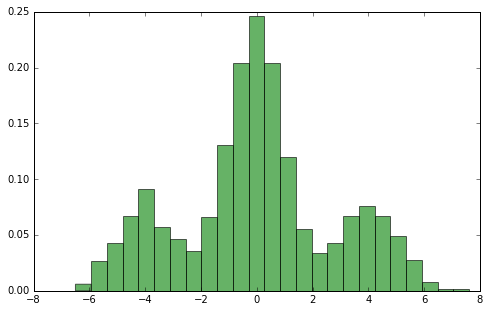
А если данные распределены не так тривиально..¶
 </cetner>
</cetner>
Предполагаем СМЕСЬ распределений¶
$$ p(x)=\sum_{z=1}^{Z}\phi_{z}p(x|\theta_{z}) $$- $Z$ - Количество компонент
- $\phi_{z},\,z=1,2,...Z$ - выраженность компоненты $z$ в смеси, $\phi_{z}\ge0,\,\sum_{z=1}^{Z}\phi_{z}=1$
- $p(x|\theta_{z})$ - функция плотности распределения
- Параметры смеси $\Theta=\{\phi_{z},\theta_{z},\,z=1,2,...Z\}$
$p(x|\theta_{z})$ могут пренадлежать разным семействам вероятностных распределений
Смесь Гауссовских распределений¶
$$p(x|\theta_{z})=N(x|\mu_{z},\Sigma_{z}),\,\theta_{z}=\{\mu_{z},\Sigma_{z}\}$$$$ p(x)=\sum_{z=1}^{Z}\phi_{z}N(x|\mu_{z},\Sigma_{z}) $$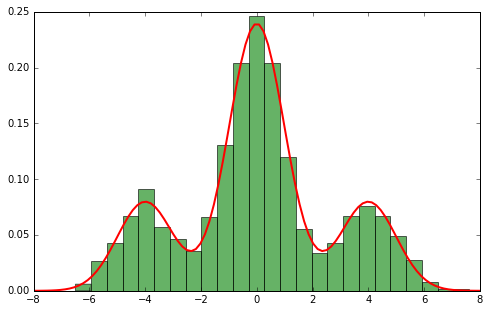
Проблема¶
- Если рассмотреть логарифм правдоподобия
- Окажется, что привычными аналитическими методами это не решить
- Будем использовать EM-algorithm!
Reminder: правило Байеса¶
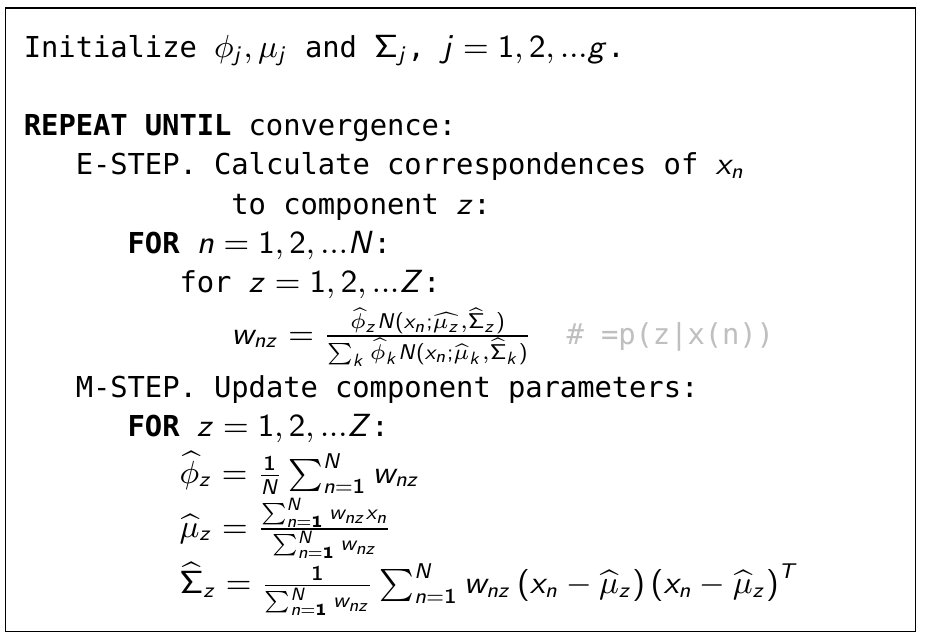
Expectation-Maximization¶
- Представим, что мы знаем значения параметров $\mu_k$-s, $\Sigma_k$-s и $\phi_k$-s.
- Оценим постериорную вероятность объекта $x_i$ принадлежать компоненте $z$: $$ w_{iz} = p(z | x) = \frac{p(z) p(x_i | z)}{\sum_{k=1}^K p(k) p(x_i | k)} = \frac{\phi_z \mathcal{N}(x_i | \mu_z, \Sigma_z)}{\sum_{k=1}^K \phi_k \mathcal{N}(x_i | \mu_k, \Sigma_k)} $$
- Имея нечеткую принадлежность каждого объекта к каждой компоненте смеси переоценим параметры, максимизирующие правдоподобие: $$ \phi_k = \frac{ \sum_{i=1}^N w_{ik} }{N}, \;\; \mu_k = \frac{\sum_{i=1}^N w_{ik} x_i}{\sum_{i=1}^N w_{ik}} $$ $$ \Sigma_k = \frac {\sum_{i=1}^N w_{ik} (x_i - \mu_k)^\top (x_i - \mu_k)}{\sum_{i=1}^N w_{ik}} $$
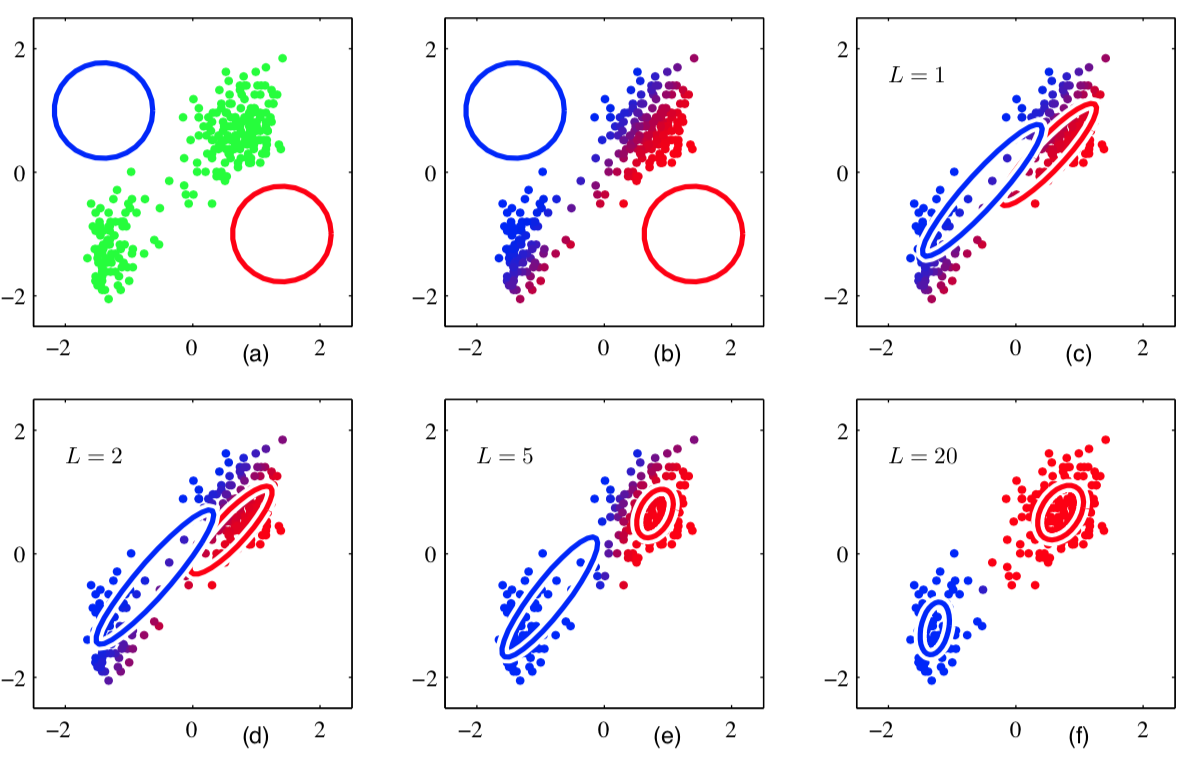
Expectation-Maximization¶
- Похоже на k-средних?
Пример работы¶
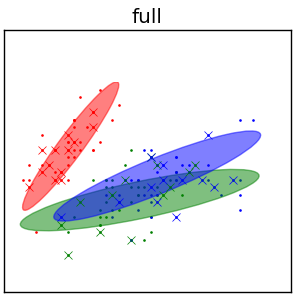
Ограничения на смеси¶
Ограничения на смеси¶
- Каждая $\Sigma_{z}\in\mathbb{R}^{DxD}$ содержит $\frac{D(D+1)}{2}$ значений параметров
Смесь без ограничений¶
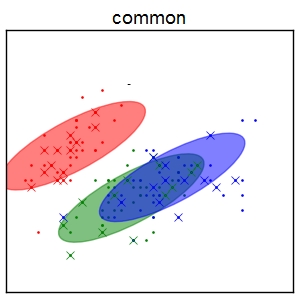
Смесь с одинаковыми \Sigma¶
- $\Sigma_{1}=\Sigma_{2}=...=\Sigma_{Z}$
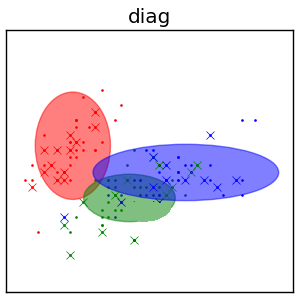
Диагональные $\Sigma$¶
- $\Sigma_{z}=\text{diag}\{\sigma_{z,1}^{2},\sigma_{z,2}^{2}...\sigma_{z,D}^{2}\}$
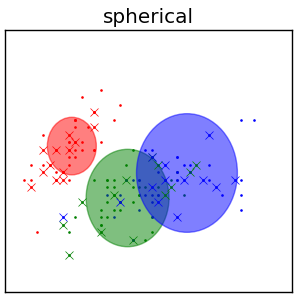
Cферические $\Sigma$¶
- $\Sigma_{z}=\sigma_{z}^{2}I$,
Cluster Validity and Quality Measures¶
Adjusted Rand Index¶
$$ \text{Rand}(\hat{\pi},\pi^*) = \frac{a + d}{a + b + c + d} \text{,}$$где
- $a$ - количество пар объектов, находящихся в одинаковых кластерах в $\hat{\pi}$ и $\pi^*$,
- $b$ ($c$) - количество пар объектов в одном и том же кластере в $\hat{\pi}$ ($\pi^*$), но в разных в $\pi^*$ ($\hat{\pi}$)
- $d$ - количество пар объектов в разных кластерах в $\hat{\pi}$ и $\pi^*$
Adjusted Rand Index¶
$$ \text{Rand}(\hat{\pi},\pi^*) = \frac{tp + tn}{tp + fp + fn + tn} \text{,}$$где
- $tp$ - количество пар объектов, находящихся в одинаковых кластерах в $\hat{\pi}$ и $\pi^*$,
- $fp$ ($fn$) - количество пар объектов в одном и том же кластере в $\hat{\pi}$ ($\pi^*$), но в разных в $\pi^*$ ($\hat{\pi}$)
- $tn$ - количество пар объектов в разных кластерах в $\hat{\pi}$ и $\pi^*$
Adjusted Rand Index - корректировка Rand index:
$$\text{ARI}(\hat{\pi},\pi^*) = \frac{\text{Rand}(\hat{\pi},\pi^*) - \text{Expected}}{\text{Max} - \text{Expected}}$$Precision, Recall, F-measure¶
- $\text{Precision}(\hat{\pi},\pi^*) = \frac{tp}{tp+fn}$
- $\text{Recall}(\hat{\pi},\pi^*) = \frac{tp}{tp+fp}$
- $\text{F-measure}(\hat{\pi},\pi^*) = \frac{2\cdot Precision \cdot Recall}{Precision \cdot Recall}$
Меры валидности кластеров¶
- Измеряют полученое разбиения по отношению к качествам хорошей кластеризации
- Компактность объектов внутри кластера
- Разделимость кластеров друг от друга
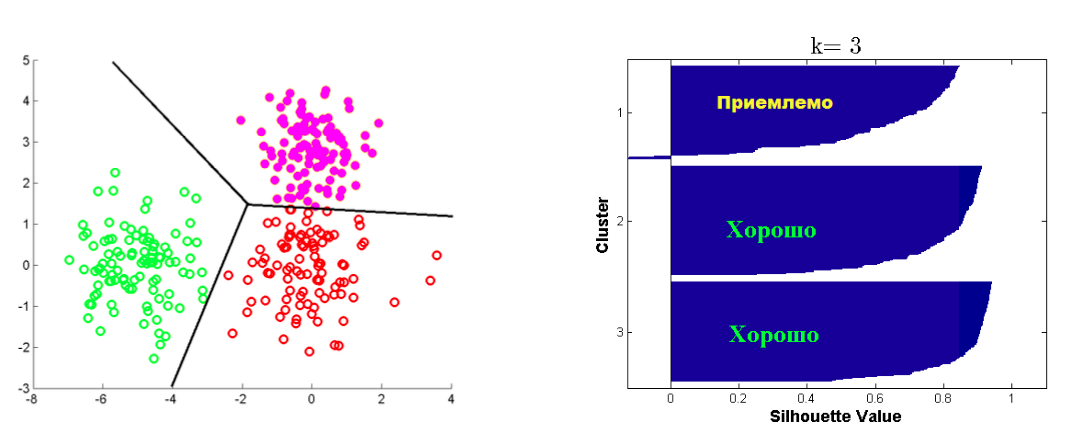
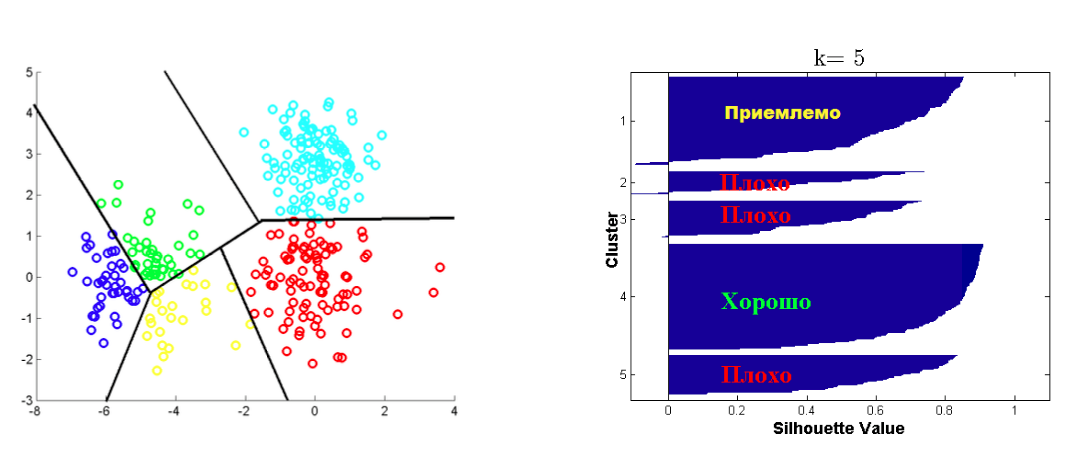
Критерий Silhouette¶
Пусть дана кластеризация в $K$ кластеров, и объект $i$ попал в $C_k$
- $a(i)$ -- среднее расстояние от $i$ объекта до объектов из $C_k$
- $b(i) = min_{j \neq k} b_j(i)$, где $b_j(i)$ -- среднее расстояние от $i$ объекта до объектов из $C_j$ $$ silhouette(i) = \frac{b(i) - a(i)}{\max(a(i), b(i))} $$ Средний silhouette для всех точек из $\mathbf{X}$ является критерием качества кластеризации.