Data Analysis
Andrey Shestakov (avshestakov@hse.ru)
Neural Networks 11
1. Some materials are taken from machine learning course of Victor Kitov
Neural Networks¶
History¶
- Neural networks originally appeared as an attempt to model human brain

Human brain consists of multiple interconnected neuron cells
- cerebral cortex (the largest part) is estimated to contain 15-33 billion neurons
- communication is performed by sending electrical and electro-chemical signals
- signals are transmitted through axons - long thin parts of neurons.
History¶
- 1943 – The first mathematical model of a neural network (Walter Pitts and Warren McCulloch)
- 1957 – Setting the foundation for deep neural networks (Frank Rosenblatt)
- 1965 – The first working deep learning networks
- 1979-80 – An ANN learns how to recognize visual patterns
- 1982 – The creation of the Hopfield Networks
- 1989 – Machines read handwritten digits (Yann LeCun)
- 1997 – Long short-term memory was proposed (Jürgen Schmidhuber and Sepp Hochreiter)
- 1998 – Gradient-based learning (Yann LeCun)
- 2011 – Creation of AlexNet
- 2014 – Generative Adversarial Networks (GAN)
Simple model of a neuron¶
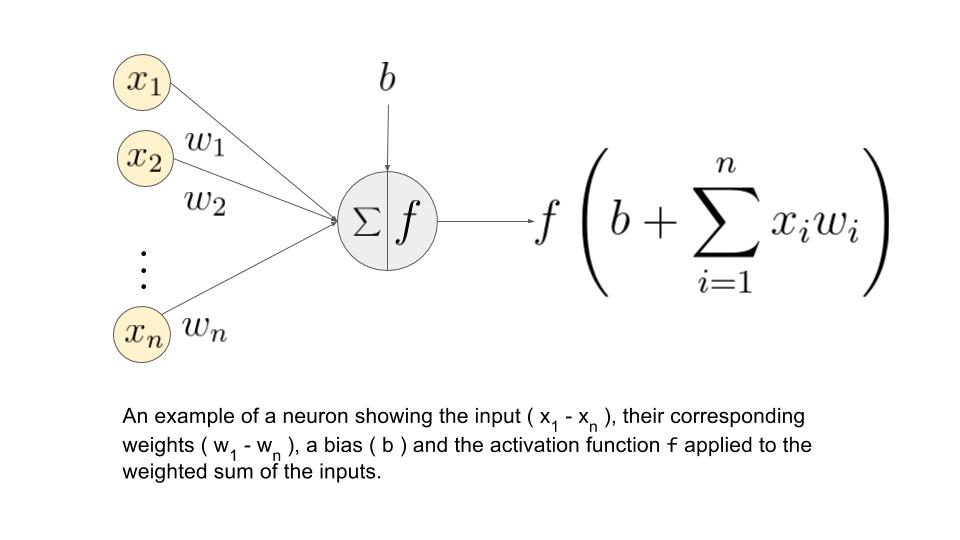
- Neuron get's activated in the half-space, defined by $b+w_{1}x^{1}+w_{2}x^{2}+...+w_{D}x^{D}\ge0$.
- Each node is called a neuron
- Each edge is associated a weight
- Constant feature $b$ stands for bias (some times reffered as $w_0$)
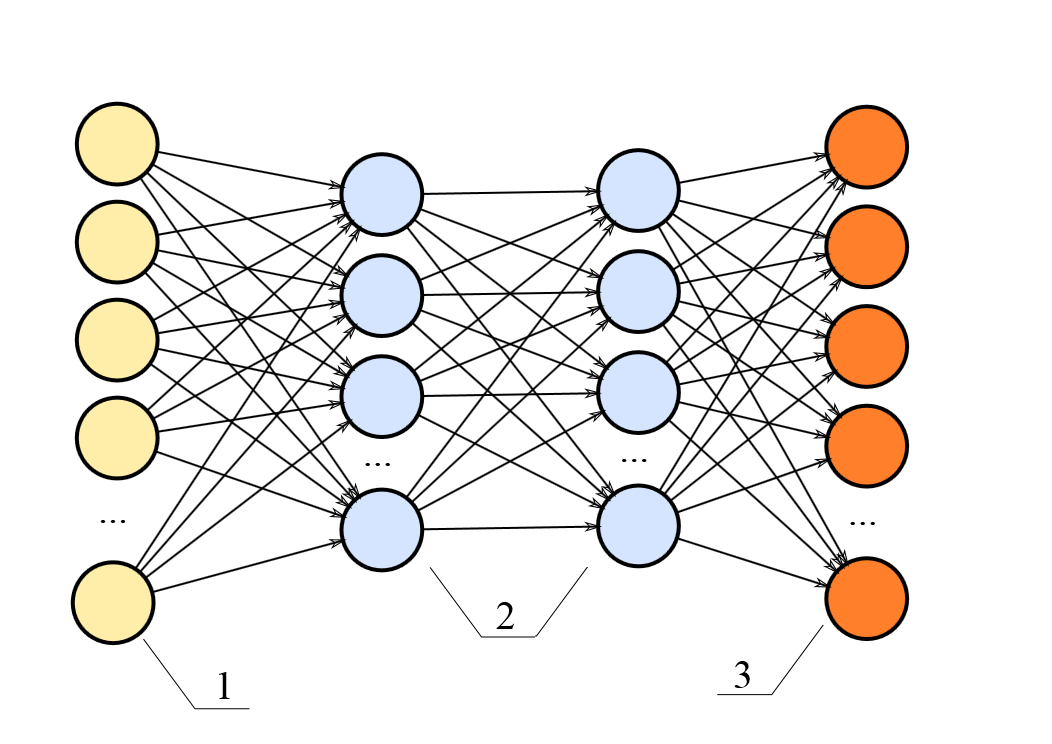
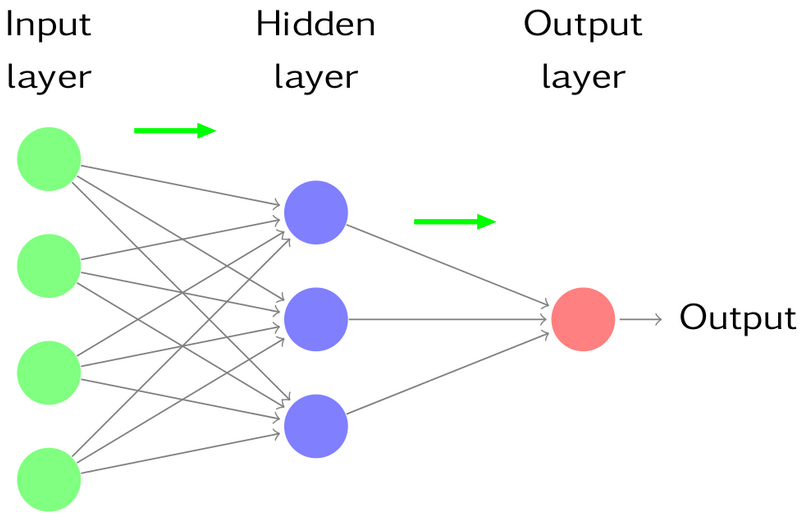
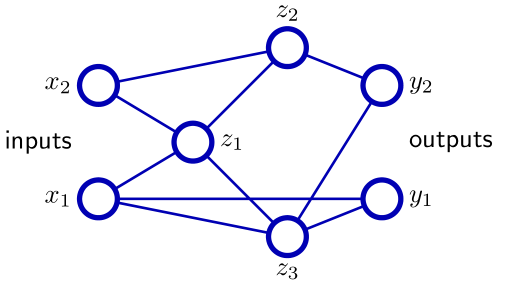
Multilayer perceptron architecture¶
- Hierarchically nested set of neurons.
- Each node has its own weights.
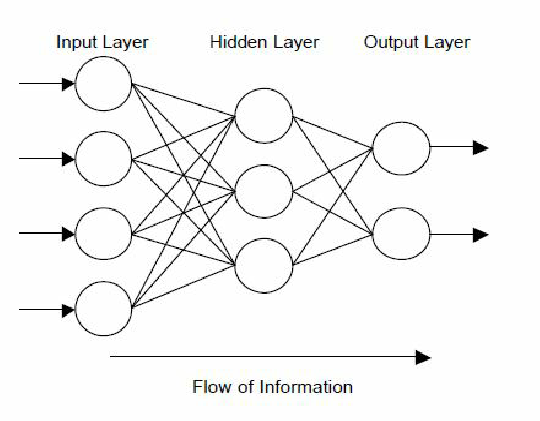
This is structure of multilayer perceptron - acyclic directed graph.
Continious activations¶
- Pitfall of $\mathbb{I}[]$: it causes stepwise constant outputs, weight optimization methods become inapliccable.
- We can replace $\mathbb{I}[w^{T}x+w_{0}\ge0]$ with smooth activation $f(w^{T}x+w_{0})$
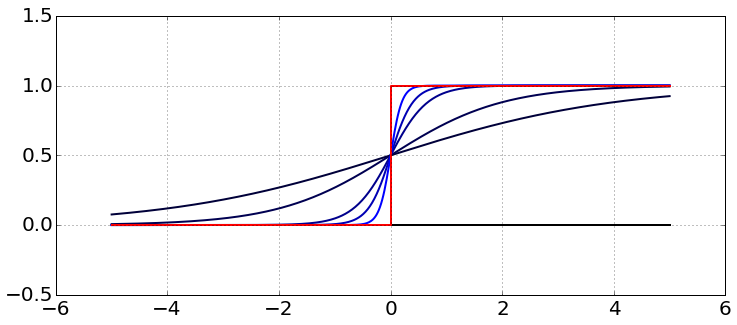
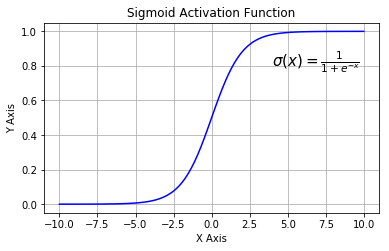
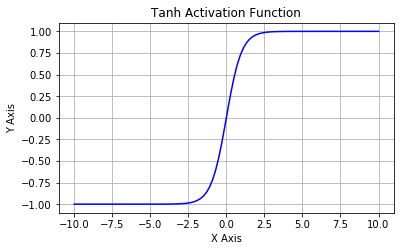
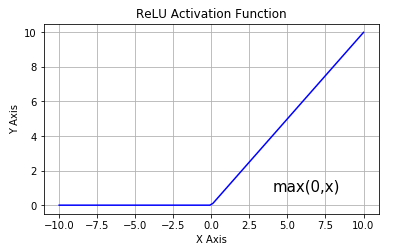
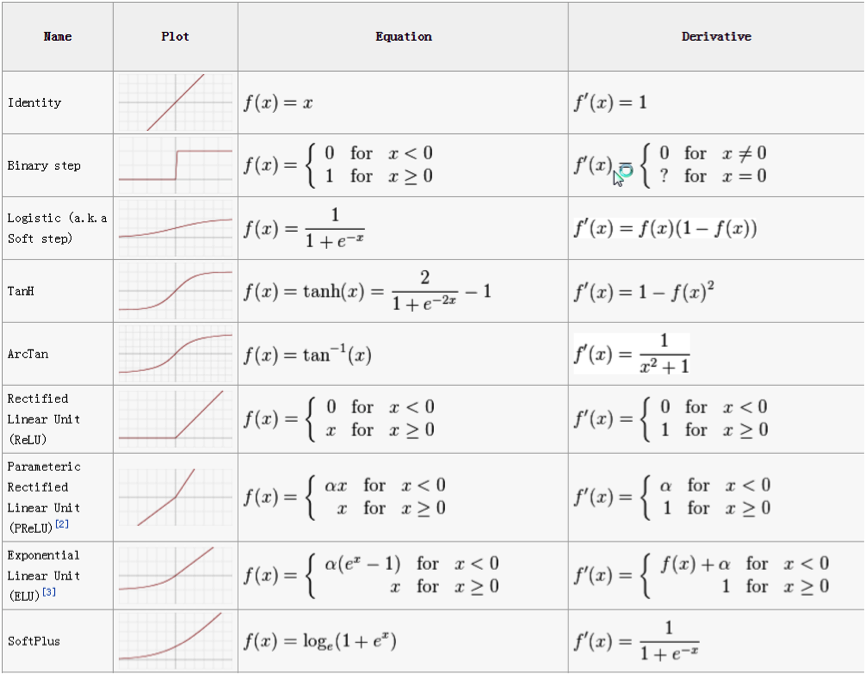
Typical activation functions¶
- sigmoidal: $\sigma(x)=\frac{1}{1+e^{-x}}$
- 1-layer neural network with sigmoidal activation is equivalent to logistic regression
- 1-layer neural network with sigmoidal activation is equivalent to logistic regression
- hyperbolic tangent: $tangh(x)=\frac{e^{x}-e^{-x}}{e^{x}+e^{-x}}$
Activation function zoo¶
Output Generation¶
Output generation¶
- Forward propagation is a process of successive calculations of neuron outputs for given features.
Definition details¶
- Label each neuron with integer $j$.
- Denote: $I_{j}$ - input to neuron $j$, $O_{j}$ - output of neuron $j$
- Input to neuron $j$: $I_{j}=\sum_{k\in inc(j)}w_{kj}O_{k}+w_{0j}$,
Output of neuron $j$: $O_{j}=f(I_{j})$.
- $w_{0j}$ is the bias term
- $f(x)$ is the activation function
- $inc(j)$ is a set of neurons with outgoing edges incoming to neuron $j$.
- further we will assume that at each layer there is a vertex with constant output $O_{const}\equiv1$, so we can simplify notation
Activations at output layer¶
- Regression: $f(I)=I$ (linear activation)
- Classification:
- binary: $y\in\{+1,-1\}$ $$ f(I)=p(y=+1|x)=\frac{1}{1+e^{-I}} $$
- multiclass: $y\in{1,2,...C}$ $$ f(I_{1},...I_{C})=p(y=j|x)=\frac{e^{I_{j}}}{\sum_{k=1}^{C}e^{I_{k}}},\,j=1,2,...C $$ where $I_{1},...I_{C}$ are inputs of output layer.
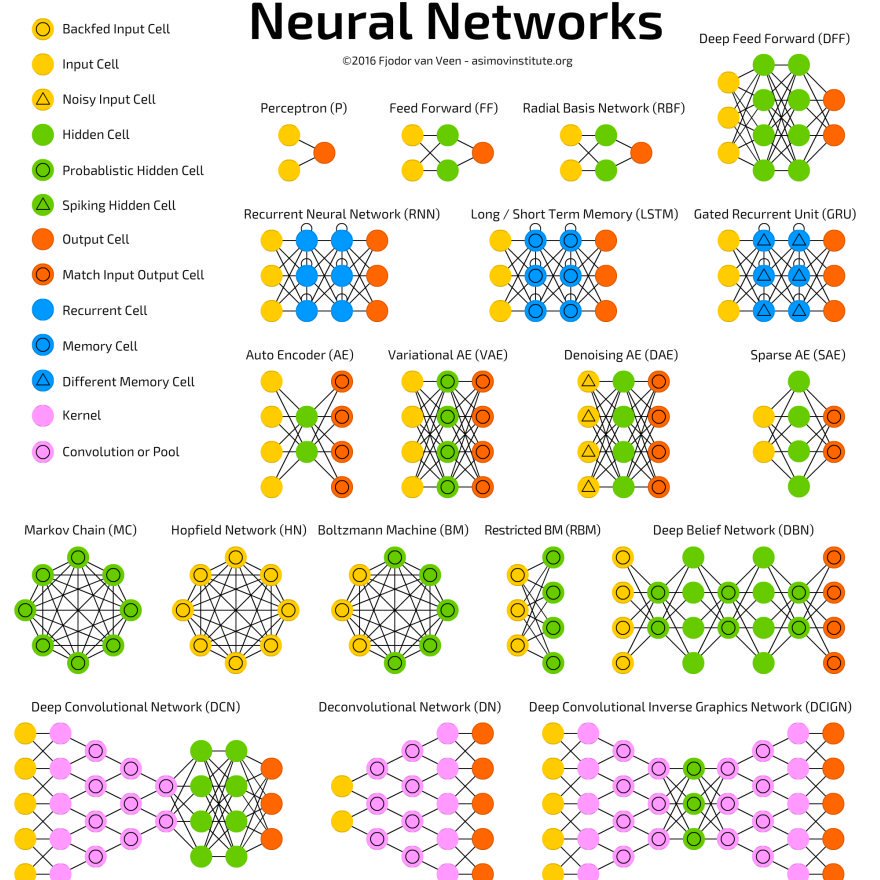
Generalizations¶
- each neuron $j$ may have custom non-linear transformation $f_{j}$
- weights may be constrained:
- non-negative
- equal weights
- etc.
- layer skips are possible
- Not considered here: RBF-networks, recurrent networks.
Number of layers selection¶
Number of layers usually denotes all layers except input layer (hidden layers+output layer)
Classification:
- single layer network selects arbitrary half-spaces
- 2-layer network selects arbitrary convex polyhedron (by intersection of 1-layer outputs)
- therefore it can approximate arbitrary convex sets
- 3-layer network selects (by union of 2-layer outputs) arbitrary finite sets of polyhedra
- therefore it can approximate almost all sets with well defined volume
Number of layers selection¶
- Regression:
- single layer can approximate arbitrary linear function
- 2-layer network can model indicator function of arbitrary convex polyhedron
- 3-layer network can uniformly approximate arbitrary continuous function (as sum weighted sum of indicators convex polyhedra)
- Sufficient amount of layers
- In practice often it is more convenient to use more layers with less total amount of neurons
- model becomes more interpretable and easy to fit.
Neural network optimization¶
Network optimization: regression¶
- Single output:
- K outputs
Network optimization: classification¶
- Two classes ($y\in\{0,1\}$):
- $C$ classes ($y_{nc}=\mathbb{I}\{y_{n}=c\}$):
- In practice log-likelihood (cross-entropy) is maximized
Neural network optimization¶
- Let $L(\widehat{y},y)$ denote the loss function of output
We may optimize neural network using gradient descent:
k=0 initialize randomly w_0 # small values for sigmoid and tangh while stop criteria not met: w_k+1 := w_k - alpha * grad(L(w_k)) k := k+1Standardization of features makes gradient descend converge faster
- But how exactly do we efficiently calculate grad(L(w_k))?
Backpropagation algorithm¶

Idea¶
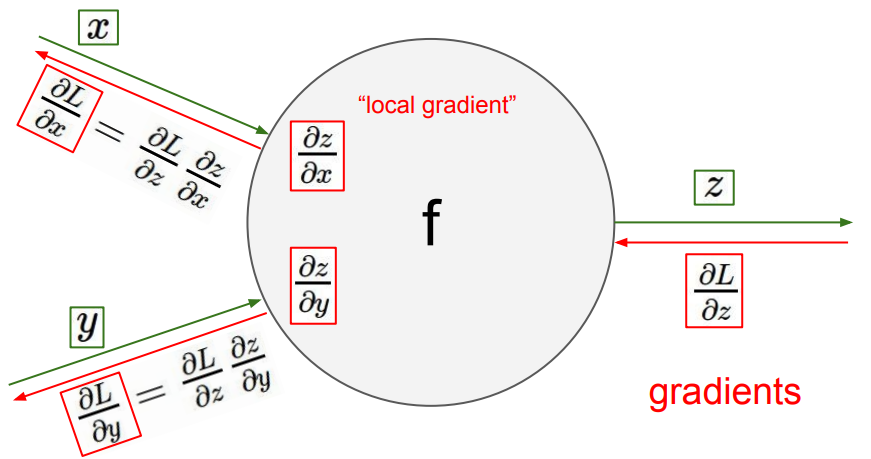
Definitions¶
- Denote $w_{ij}$ as weight of edge, connecting $i$-th and $j$-th neuron
- Define $\delta_j = \frac{\partial L}{\partial I_j} = \frac{\partial L}{\partial O_j}\frac{\partial O_j}{\partial I_j}$
- Since $L$ depends on $w_{ij}$ through the following functional relationship $L(w_{ij}) = L\left(O_j\left(I_j(w_{ij})\right)\right)$, using the chain rule we get: $$ \frac{\partial L}{\partial w_{ij}} = \frac{\partial L}{\partial I_j}\frac{\partial I_j}{\partial w_{ij}} = \delta_j O_i$$ because $\frac{\partial I_j}{\partial w_{ij}} = \frac{\partial}{\partial w_{ij}} \left(\sum\limits_{k\in inc(j)} w_{kj} O_k\right) = O_i$, where $inc(j)$ is a set of neurons with outgoing edges to neuron $j$
Output layer¶
- If neuron $j$ belongs to the output node, then error $\frac{\partial L}{\partial O_j}$ is calculated easily
- For output layer $\delta_j$ are calculated directly: $$ \delta_j= \frac{\partial L}{\partial O_j}\frac{\partial O_j}{\partial I_j} = \frac{\partial L}{\partial O_j} f'(I_j) \qquad (1)$$
- Example (single point $x$ and true vector of outputs $(y_1,\dots,y_{|OL|})$:
- For $L = \frac{1}{2}\sum\limits_{j\in OL}(O_j - y_j)^2$ and sigmoid activation $$ \frac{\partial L}{\partial O_j} = O_j - y_j $$
- Sigmoid activation function $O_j = \sigma(I_j)$: $$ f'(I_j) = \sigma(I_j)(1-\sigma(I_j)) = O_j(1-O_j) $$
- finally $$ \delta_j = (O_j - y_j)O_j(1-O_j)$$
Inner layer¶
- If neuron $j$ belongs to some hidden layer, denote $out(j) = \{k_1, k_2, \dots, k_m\}$ the set of all neurons, receiving output of neuron $j$ as their input
- The effect of $O_j$ on $L$ is fully absorbed by $I_{k_1},I_{k_2},\dots,I_{k_m}$, so $$ \frac{\partial L(O_j)}{\partial O_j} = \frac{\partial L(I_{k_1},I_{k_2},\dots,I_{k_m})}{\partial O_j} = \sum\limits_{k\in out(j)} \left( \frac{\partial L}{\partial I_k} \frac{\partial I_k}{\partial O_j} \right) = \sum\limits_{k\in out(j)} \left(\delta_k w_{jk}\right)$$
- So for layers other than output layer we have: $$ \delta_j = \frac{\partial L}{\partial I_j} = \frac{\partial L}{\partial O_j}\frac{\partial O_j}{\partial I_j} = \sum\limits_{k\in out(j)} \left(\delta_k w_{jk}\right) f'(I_j) \qquad (2)$$
- Weight derivatives are calculated using errors and outputs: $$ \frac{\partial L}{\partial w_{ij}} = \frac{\partial L}{\partial I_j}\frac{\partial I_j}{\partial w_{ij}} = \delta_jO_i \qquad (3)$$
Backprop¶
- Forward propagate $x_n$ to the neural network, store all inputs $I_j$ and outputs $O_j$ for each neuron
- Calculate $\delta_i$ for all $i \in$ output layer using $(1)$ $$ \delta_j = \frac{\partial L}{\partial O_j} f'(I_j) $$
- Propagate $\delta_i$ from final layer back layer by layer $(2)$ $$ \delta_j = \sum\limits_{k\in out(j)} \left(\delta_k w_{jk}\right) f'(I_j)$$
- Using calculated deltas and outputs calculate $\frac{\partial L}{\partial w_{ij}}$ with $(3)$ $$ \frac{\partial L}{\partial w_{ij}} = \delta_jO_i $$ And update weights
Multiple local optima problem¶
- Optimization problem for neural nets is non-convex.
Different optima will correspond to:
- different starting parameter values
- different training samples
So we may solve task many times for different conditions and then
- select best model
- alternatively: average different obtained models to get ensemble
And/Or use some complex optimization methods
Vanishing Gradient Problem¶
In [4]:
x = np.linspace(-10, 10, 1000)
gr_sigm = sigmoid(x)*(1-sigmoid(x))
plt.plot(x, gr_sigm)
Out[4]:

- Feature scaling
- Careful weight initialization
- Using ReLU activation function
Model complexity and overfitting¶
- Constrain model directly:
- constrain number of neurons
- constrain number of layes
- impose constraints on weights
- Take a flexible model
- early stopping (with validation set)
- L2 regularization $$ L(w) + \lambda\sum_i w_i^2 $$
- Augmentation (more used in convnets)
Other things to know¶
Dropout technique¶
- Have L1 and L2 regularization for weights
- Can complement it with Dropout
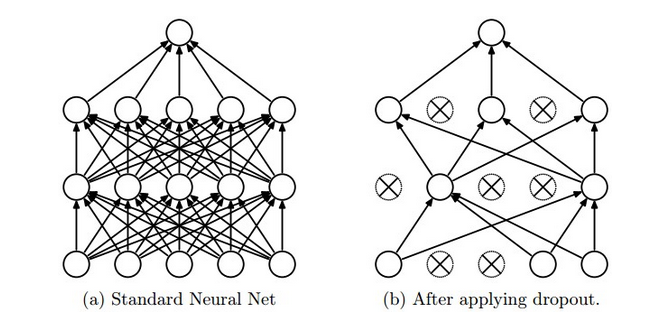
- Training: Dropout can be interpreted as sampling a Neural Network within the full Neural Network
- Testing: not applied
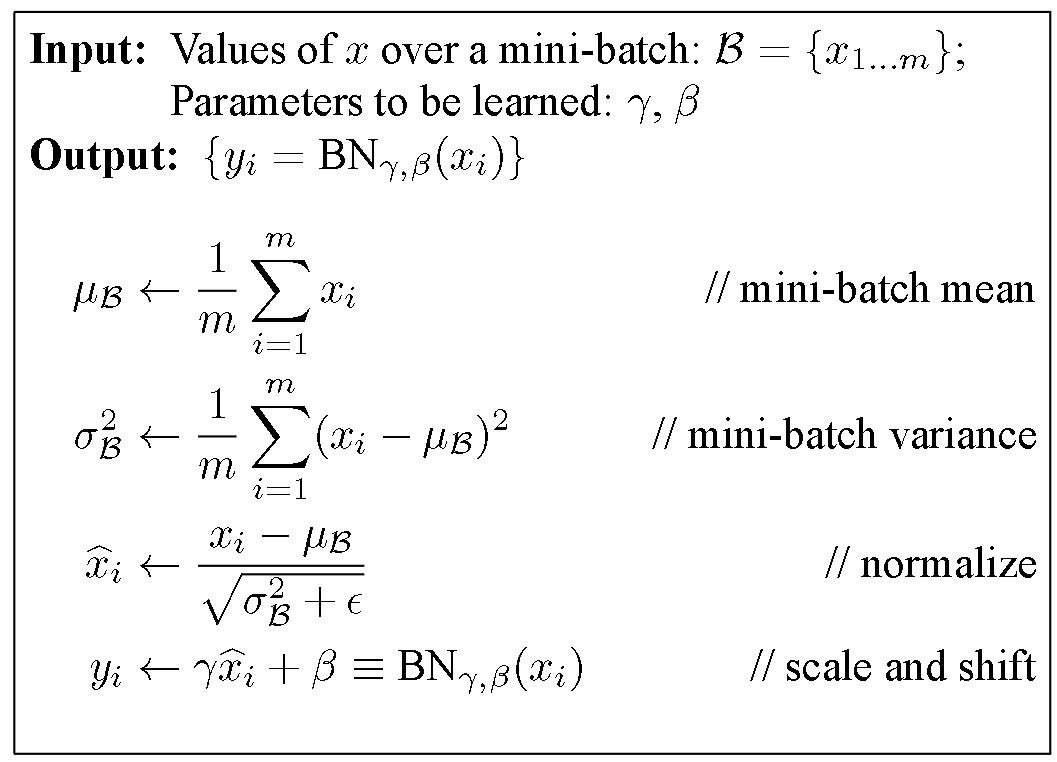
Batch Normalization¶
- Bad Weight Initialization
- Vanishing Gradients
- Normalize data right before non-linearities (or after ?!)
Conclusion¶
Advantages of neural networks:
- can model accurately complex non-linear relationships
- easily parallelizable
Disadvantages of neural networks:
- hardly interpretable ("black-box" algorithm)
- optimization requires skill
- too many parameters
- may converge slowly
- may converge to inefficient local minimum far from global one